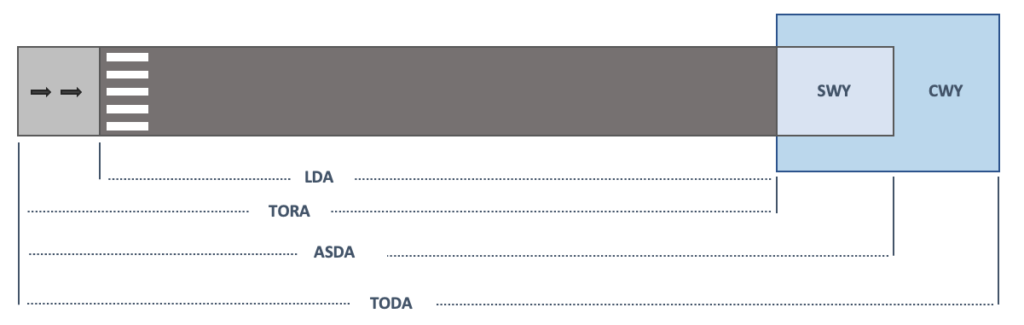
What is TORA?
- It stands for Take Off Run Available
- It is the runway length available for takeoff
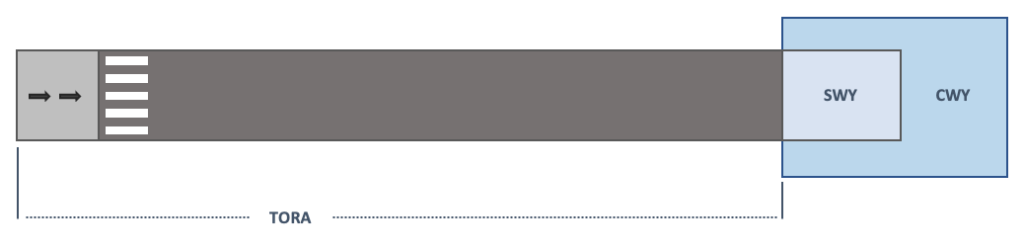
What is clearway?
- It is an area beyond TORA, free of obstructions (over ground or water), over which an aircraft can reach the screen height in the event of an engine failure on takeoff
Note: Not every runway has a clearway
What are the clearway limitations?
- Clearway must be less than or equal to 50% of TORA
- Clearway must be at least 152 m (500 ft) wide
[Updated] What is screen height?
- It is the minimum height that an aircraft must achieve before the end of TODA in the event of an engine failure on takeoff
- For class B aircraft screen height is always 50 ft
- For class A aircraft screen height is 35 ft for a dry runway and 15 ft for a wet runway
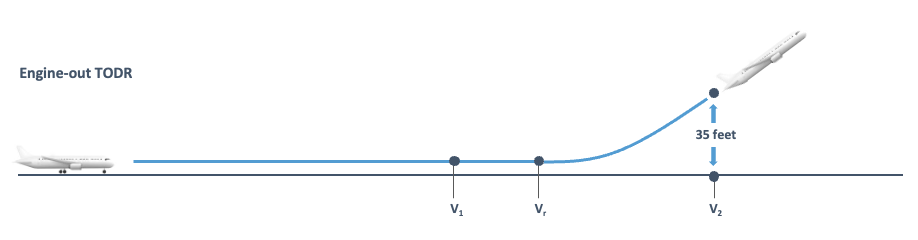
Note: Although screen height for wet runways is reduced to 15 ft, V2 must still be achieved by 35 ft
Additional information:
- Class A aircraft are all multi-engine jets and turboprops with more than 9 passenger seats or MTOW > 5700 kg
- Class B aircraft are propeller driven aircraft with 9 passenger seats or less and MTOW of 5700 kg or less
Background info:
- The reason why screen height for class A aircraft reduces from 35 ft to 15 ft on a wet runway is because of reduced V1
- On a wet runway, V1 reduces in order to allow for reduced braking capability
- This means however that in case of an engine failure at V1, the time taken to accelerate to Vr with one-engine-inoperative would be increased, and therefore TODR would be increased
- Screen height of 15 ft compensates for the increased TODR and allows aircraft to achieve screen height within TODA
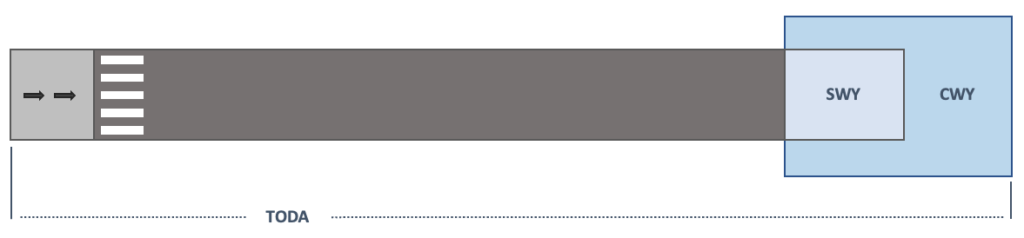
What is TODA?
- It stands for Take Off Distance Available
- It is the runway length available for takeoff plus the length of the clearway (TORA + Clearway)
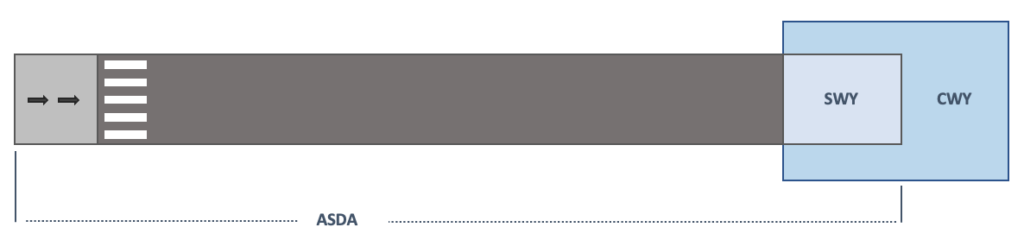
[Updated] What is stopway?
- It is an area beyond TORA in which an aircraft can be safely stopped in the event of a rejected takeoff
- Stopway is designed to be used only for rejected takeoff and not for landing
Note: Not every runway has a stopway
What is ASDA?
- It stands for Accelerate Stop Distance Available
- It is the runway length available for takeoff plus the length of the stopway (TORA + Stopway)
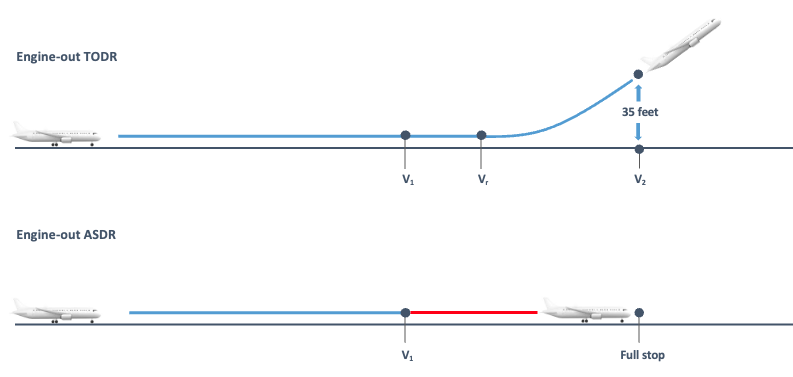
What is balanced V1?
- The V1 that results in TODR equal to ASDR is called balanced V1
- If an engine failed just prior to V1 the point at which the aircraft would come to a complete stop in the STOP case would be the same with the point at which the aircraft would reach the screen height in the GO case
- Balanced V1 gives the minimum field length required for a given weight, called balanced field length. Any lower V1 would increase TODR as it would take longer for the aircraft to accelerate to V2 with one-engine-inoperative and any higher V1 would increase ASDR due to higher energy absorption by the brakes
- In essence, balanced V1 improves field length limited takeoff performance (FMC speeds are based on balanced V1)
Note:
- Field length can be limited by either ASDR, TODR or 115% of all-engine TODR
- If an engine failed exactly at V1, you may not be able to reject the takeoff within ASDR
- This is because of minimum recognition time required between the engine failure and initiation of RTO (i.e. engine failure at V1 means that the first action to reject takeoff would be taken after V1)
[Updated] What is unbalanced V1?
- Any V1 that results in TODR different than ASDR is called unbalanced V1
- Unbalanced V1 allows for higher takeoff weights by taking advantage of any runway and clearway or stopway available in excess of balanced field length (optimum V1)
[New] What is the effect of clearway on field length limited TOW and how does it affect V1?
- Balanced V1 (TODR = ASDR) results in maximum TOW for a given field length
- On a runway without any clearway or stopway, TODA = ASDA. This means that in the case of field length limited TOW, balanced V1 results in TODR = ASDR = ASDA = TODA
- With ASDR = ASDA, V1 cannot go any higher. On a runway with no clearway, this means that TOW cannot be increased anymore
- This is because a higher TOW requires a lower V1 so that ASDR does not exceed ASDA, but a lower V1 increases TODR, resulting in TODR > TODA
- However, as clearway increases TODA, it allows field length limited TOW to be increased. This is achieved by using a slightly lower V1 to allow for ASDR to not exceed ASDA and a slightly higher Vr to compensate for higher lift required
- Although the slightly lower V1 (unbalanced V1) increases TODR, TOW can be increased as long as TODR does not exceed TODA
What is the reason for the “80 kts” or “100 kts” (depending on the aircraft type) call during takeoff roll?
Incapacitation check
- If a pilot is incapacitated at this point, the aircraft should be considered unsafe to fly (rejecting the takeoff is considered safer than continuing) and therefore takeoff should be rejected
Airspeed crosscheck
- If CPTs and FOs speeds do not agree at this point, the aircraft should be considered unsafe to fly (rejecting the takeoff is considered safer than continuing) and therefore takeoff should be rejected
Marks the point of transition from the low speed phase to the high speed phase of the takeoff roll
- The significance of this is that the reasons to reject a takeoff differ depending if the failure happens at low speed (below 80 or 100 kt) and high speed (above 80 or 100 kt)
- There are much fewer reasons to reject a takeoff at high speed than they are at low speed
What is V1?
- V1 is the takeoff decision speed
- It is the maximum speed at which the pilot must take the first action to reject the takeoff and the minimum speed to continue the takeoff in the event of an engine failure
- If the pilot has not initiated the rejection of takeoff by V1, then the Go decision has already been made
Note: This is the reason why captains remove their hand from the thrust levers immediately at the V1 call
What is Vr?
- Vr is the takeoff rotation speed
- It allows to achieve V2 by 35 ft above the takeoff surface in the event of an engine failure on takeoff
What is V2?
- V2 is the takeoff safety speed
- It is the minimum speed to be flown during the 2nd takeoff segment, that provides adequate climb performance and directional control in the event of engine failure on takeoff
- It should be achieved by 35 ft above the takeoff surface
Note: V2 is flown during engine-out operations and not during normal operations. During normal operations initial climb speed is usually V2+10 or V2+20 depending on aircraft type
Background info:
- V2 is the minimum speed to be flown in case of EFATO (Engine Failure After Take Off) and not always the target speed
- Flight directors will command pitch attitudes that result in V2 or speed at which the engine failure happened, whichever is higher (usually limited to V2+20 or V2+15 depending on aircraft type)
[Updated] What is Vmcg?
- It is the minimum control speed on the ground (IAS and not ground speed)
- At or above this speed, it would be possible to continue the takeoff and maintain directional control using the rudder only (i.e. no nose wheel steering) if the critical engine failed during takeoff
- This is why V1 must always be equal or greater than Vmcg
Note:
- V speeds always refer to IAS and not TAS or Groundspeed
- The reason is because the aerodynamic performance of the aircraft (e.g. rudder effectiveness) is related to the kinetic energy of airflow (dynamic pressure) from which IAS is calculated and not its speed over the ground
- Below Vmcg differential braking would be needed to maintain directional control (takeoff must be rejected)
Background info:
- Vmcg allows for 30 ft deviation from centerline
- Vmcg is based on no use of nose wheel steering as on non-dry runways nose wheel steering should not be used above taxi speed because it may cause nose wheel hydroplaning and potential loss of directional control
- Vmcg is calculated based on 0 crosswind
- This is the reason why the upwind engine of a twin-engine jet aircraft is not considered critical engine (see more information on chapter Aircraft General Knowledge)

What would be the implications of an engine failure at Vmcg when taking off with crosswind?
Failure of upwind engine will result in worse handling characteristics. Let’s see why:
- During takeoff roll (jet aircraft), if crosswind is from the right, we are going to need opposite (left) rudder to maintain centerline and aileron into the wind (right) as required to keep the wings level
- If engine no2 fails during takeoff roll (right engine), we are going to need even more left rudder to maintain directional control and Vmcg does not account for that
- Therefore, failure of the upwind engine during takeoff roll will result in worse handling characteristics than Vmcg accounts for
What is Vmca?
- It is the minimum control speed in the air
- At this speed, full rudder deflection would be necessary to maintain wings level in the event of failure of the critical engine (using only the primary flight controls)
[New] How does Vmca and Vmcg change with pressure altitude and temperature?
- Vmcg and Vmca decrease with higher pressure altitude and temperature
- This is because higher pressure altitude and higher temperature means lower air density which results in less thrust and thus less thrust asymmetry in case of an engine failure
- Because of less thrust asymmetry, directional control is going to be easier, requiring lower Vmca/Vmcg
What is the relationship between Vmca and Vr?
- Vr must always be greater than Vmca (Vr greater than or equal to 1.05 Vmca )
What is the relationship between Vmcg and V1?
- Vmcg must always be less than or equal to V1
What is the relationship between V1 and Vr?
- V1 must always be less than or equal to Vr
What is the relationship between Vmca and V2?
- Vmca must always be less than V2 (1.1 x Vmca less than or equal to V2)
- The difference between these speeds, is that V2 provides adequate climb performance in the event of an engine failure
How does V1 change on a non-dry runway?
- It decreases in order to allow for reduced braking capability on a non-dry runway
How do takeoff speeds vary with weight?
- The heavier the aircraft the higher the takeoff speeds
- This is because as weight of the aircraft increases, a greater amount of lift is required in order to get the aircraft airborne, which is achieved by increasing the takeoff speeds
Why does balanced V1 increase with increasing weight?
- Higher weight means higher lift required for the aircraft to get airborne which means higher Vr
- As Vr increases, V1 needs to be increased as well
- This is because if V1 did not increase, it would increase the time needed to accelerate to Vr with one-engine-inoperative should an engine failure occurred at V1
Note:
- If field length limited, it is important to understand that field length is limited by both ASD and TOD, and although a lower V1 would reduce ASD, it would increase TOD
- The V1 that minimizes the field length required for takeoff is the balanced V1 (i.e. ASD = TOD) which increases with increasing weight
How do takeoff speeds vary with flap settings?
- The higher the flap settings the lower the takeoff speeds
- This is because higher flap settings increase S (wing surface area) and Cl (coefficient of lift) of the wing, which results in lower takeoff speeds required in order to generate the same amount of lift
How does fuel burn vary with flap settings?
- The higher the takeoff or landing flap settings the higher the fuel burn
- This is due to increased drag
How would you configure for a field length limited takeoff?
- Use higher flap settings because they would result in reduced takeoff speeds
- By lowering the V1 you increase the remaining field length available in the STOP case
- By lowering the Vr and V2 you can liftoff and achieve V2 and screen height faster in the GO case
How would you configure for a climb or obstacle limited takeoff?
- Use lower flap settings because they would result in less drag and an increased V2 which in turn leads to better climb performance
Note: In case of Obstacle limited TOW, acceleration height is increased to extend the second takeoff segment
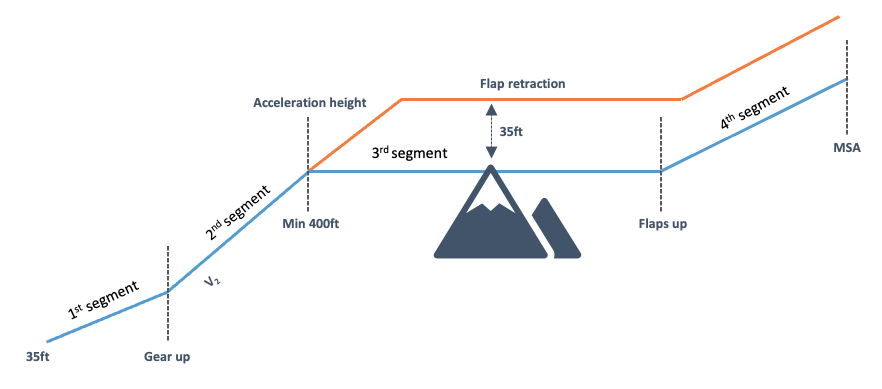
[Updated] What are the four takeoff segments in the event of an engine failure?
- Segment 1: starts from screen height and ends when gear is fully retracted
- Segment 2: starts from gear retraction and ends at acceleration height (which cannot be less than 400 ft AAL). Minimum climb gradient for the 2nd segment is 2.4% for twin-engine aircraft and minimum speed to be maintained is V2
- Segment 3: starts from acceleration height and ends when flaps are fully retracted
- Segment 4: starts from flaps up and ends when the aircraft reaches 1500 ft AAL or MSA
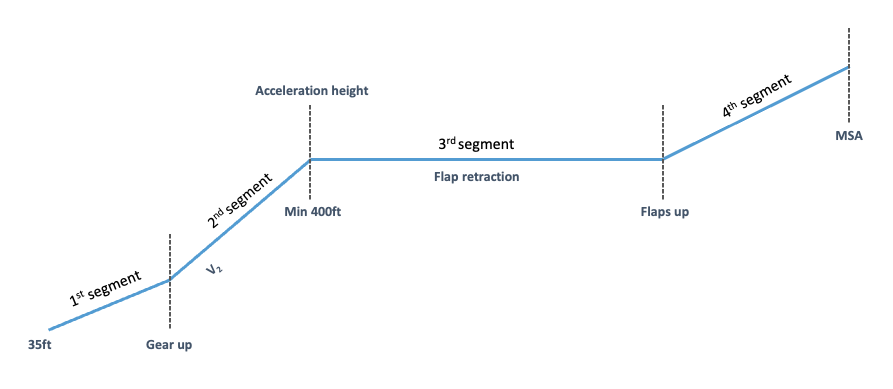
Note: The four takeoff segments refer only to engine-out operations and not to normal operations
What is assumed (or flex for Airbus) temperature?
- It is a method of calculating our takeoff performance based on a higher temperature than the actual one (assuming a higher temperature)
- Flat rated jet engines are designed to produce constant (flat) thrust up to a certain temperature set by the manufacturer
- Above this temperature, takeoff thrust is going to be reduced
- Assumed temperature results in reduced thrust and reduced EGT for takeoff which increases engine’s life and reduces maintenance costs
- Reduced thrust will also result in higher TORR (i.e. longer ground roll required for takeoff)
Background info:
- There is a common misconception that assumed (or flex) temperature results in reduced fuel burn due to less thrust being used, but that’s not the case. In fact, the opposite is true
- The reason why assumed temperature results in increased fuel burn, is because as less thrust is used for takeoff and climb, it will take longer for the aircraft to reach its optimum altitude
- This means that it will spend more time at lower altitudes and less time at its optimum altitude, where it is most efficient
- Reduced maintenance costs however outweigh the increased fuel burn
[Updated] What is Vx?
- It is the maximum angle of climb speed
- You would use this speed to gain altitude in the shortest distance (e.g. if ATC instructs you to climb and be level by a certain waypoint)
Background info:
- For jet aircraft, Vx is equal to the minimum drag speed
What is Vy?
- It is the maximum rate of climb speed (it is higher than Vx)
- You would use this speed to gain altitude in the shortest time (e.g. if ATC instructs you to expedite your climb)
What is the difference between VMO and MMO?
- VMO is the aircraft’s maximum operating speed
- MMO is the aircraft’s maximum operating Mach number
- At lower altitudes the aircraft is limited by IAS (VMO) whereas at higher altitudes it is limited by Mach number (MMO)
- For example, Boeing 737NG has a VMO of 340 kts and MMO of 0.82
- Up to approximately 26000 ft which is called the crossover altitude, the aircraft is limited by 340 kts IAS
- Above this altitude Mach 0.82 would be more restrictive
[Updated] What is VNE?
- It is the never exceed speed for piston engine aircraft
[Updated] What is VNO?
- It is the maximum normal operating speed for piston engine aircraft
[New] What is the difference between Vle and Vlo?
- Vle is the maximum landing gear extended speed. It is the maximum speed to fly with the landing gear extended
- Vlo is the maximum landing gear operating speed. It is the maximum speed to operate (i.e. extend or retract) the landing gear
Note:
- Vlo cannot be higher than Vle
What is Vmcl?
- Vmcl is the minimum control speed for approach and landing
- At this speed, full rudder deflection would be necessary to maintain wings level in the event of failure of the critical engine and with the operative engine set at go around thrust
What is Vref?
- Vref is the landing reference speed
- It is equal to 1.3 x stalling speed in landing configuration (Vs0)
Note:
- Vref is always greater than or equal to Vmcl
- This ensures adequate aircraft directional control in the event that the critical engine fails on final approach leading to go around
Why is it important to be accurate with your speed during approach?
- Landing at a speed higher than the calculated touchdown speed will increase the landing distance (10% higher speed will increase landing distance by approximately 20%)
- Flying below Vref brings the speed closer to Vs0 (stalling speed in landing configuration). It also reduces safety margins in the event of an engine failure requiring a go around as Vref is always greater than or equal to Vmcl and ensures adequate directional control
How do flap settings affect landing distance?
- Higher flap settings decrease landing distance due to more drag and lower approach speeds
If you need to land with flaps up due to a flap malfunction, how will this affect landing distance required?
- Higher landing distance will be required due to higher touchdown speed and less drag
How does the ground effect affect landing distance?
- It increases the landing distance due to increased lift and reduced drag due to runway surface blocking the wing tip vortices left behind the wings
[New] What are the three forces that help a jet aircraft decelerate after landing?
- Brakes, drag (spoilers) and reverse thrust
Note:
- Reverse thrust and drag effectiveness decreases as the airspeed decreases
- Brakes account for the biggest stopping force on dry runways. On non-dry runways, as braking effectiveness is reduced due to reduced surface friction, the effect of reverse thrust and drag becomes even more significant
How does weight, pressure altitude, temperature, wind and pressure affect takeoff and landing performance?
Weight:
- Increased weight reduces takeoff and landing performance (due to higher speeds)
Pressure altitude:
- Higher pressure altitudes reduce takeoff and landing performance (due to decreased air density and reduced thrust available – same IAS but higher TAS)
Temperature:
- Increased temperature reduces takeoff and landing performance (due to decreased air density)
Wind:
- Headwind improves takeoff and landing performance (due to lower groundspeed)
Pressure:
- Higher pressure improves takeoff and landing performance (due to higher air density)
[Updated] What is the effect of headwind on takeoff performance?
- With headwind IAS increases faster and lift-off is achieved at lower ground speeds requiring less runway for takeoff
- For example, if Vr is 140 kts and headwind is 30 kts, the ground speed at which rotation will be initiated will be 110 kts
What is the effect of headwind on landing performance?
- Headwind decreases aircraft’s ground speed and therefore will touchdown at a lower ground speed
- This decreases the kinetic energy the brakes need to absorb in order to stop the aircraft and therefore decreases the landing distance
Note: Kinetic energy varies proportionally with the square of the aircraft’s speed (kinetic energy=1/2 x m x V²). This means that a 10% higher airspeed on touchdown would lead to 21% higher kinetic energy for the brakes to absorb. This emphasizes the importance of landing at the correct speed, especially on short fields.
What percentage of the headwind and tailwind component are takeoff and landing performance calculations based on?
- 50% of headwind component and 150% of tailwind component
[New] What is the difference between dispatch LDR for dry and wet runway?
- Dry runway: Dispatch LDR = Actual LDR x 1.67
- Wet runway: Dispatch LDR = Actual LDR x 1.92 (wet runway factored by an additional 15% i.e. 1.67 x 1.15)
[New] What is the approach climb gradient?
- Approach climb gradient indicates the capability of the aircraft to climb during a go around with one engine inoperative, go around thrust (TOGA thrust), gear up and flaps in approach configuration (as per aircraft type)
Approach climb gradient should be at least:
- 2.1% for two-engine aircraft
- 2.4% for three-engine aircraft
- 2.7% for four-engine aircraft
[New] What is the landing climb gradient?
- Landing climb gradient indicates the capability of the aircraft to climb during a go around with all engines operative, maximum go around thrust achieved within 8 seconds (TOGA thrust), gear down and flaps in landing configuration
Additional information:
- Landing climb gradient should be at least 3.2%
What are the three types of energy that pilots have to manage during the flight?
- Kinetic energy (speed)
- Potential energy (altitude)
- Chemical energy (fuel)
- Kinetic energy: The higher the speed, the higher the aircraft’s kinetic energy. Kinetic energy can only be converted to potential energy (e.g. during terrain escape maneuver, we pitch up to change airspeed for altitude)
- Potential energy: The higher the altitude, the higher the aircraft’s potential energy. Potential energy can only be converted to kinetic energy (e.g. if high on profile, we change altitude for airspeed to regain the path)
- Chemical energy: Fuel in the tanks lets the engines produce thrust. We can use thrust to convert it to potential or kinetic energy (speed or altitude)
Hoes does runway slope affect takeoff and landing performance?
- A positive runway slope will reduce aircraft’s acceleration on takeoff (reduces takeoff performance) and increase aircraft’s deceleration on landing (improves landing performance)
- The opposite is true for a negative runway slope
[New] When is a runway considered contaminated?
- When 25% or more of a third of the runway’s surface is covered with ice, slush, snow or standing water (water depth > 3 mm)
Note:
- After GRF (Global Reporting Format) implementation, 25% is based on each third of runway’s surface and not the total surface of the runway
[Updated] What is hydroplaning speed and how is it calculated?
- Hydroplaning speed is the minimum groundspeed at or above which the aircraft will start hydroplaning (tires lose contact with the runway’s surface, wheels start skidding and brakes lose effectiveness)
- Hydroplaning speed depends solely on the tire pressure of the wheels (hydroplaning speed=9 x square root of tire pressure)
- The higher the tire pressure the higher the hydroplaning speed
Note:
- Hydroplaning speed is the minimum groundspeed at or above which the aircraft will start hydroplaning. If hydroplaning has started, then it can continue at speeds much lower than the hydroplaning speed
- Hydroplaning can occur even on wet runways (i.e. less than or equal to 3 mm of water)
Background info:
- To protect against hydroplaning, aircraft are fitted with anti skid system which, as its name implies, prevents against skidding of the wheels
- The way it does that, is by releasing pressure to the skidding wheels until they start rotating again
- Once they start rotating, then brake pressure is applied again
- This results in optimum braking
What is the 3 Kelvin spread rule?
- If temperature is 3° C or less and dew point spread (i.e. difference between temperature and dew point) is 3° C or less, the runway may be more slippery than anticipated
- It is a rule of thumb used to anticipate worse runway conditions than reported by ATIS/ATC during winter operations
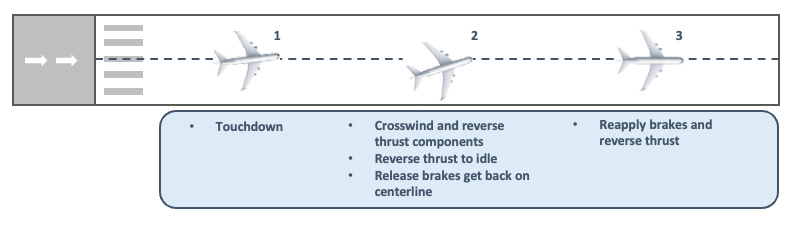
[Updated] After landing on a slippery runway with high crosswind from the left the aircraft starts drifting towards the right side of the runway. How can you regain directional control in this case?
- When landing on a slippery runway, there are two forces that push the aircraft towards the downwind side; crosswind and reverse thrust
- In this case, since the crosswind is from the left the wind will be pushing the aircraft to the right. Because wind pushes aircraft’s tail to the right, it causes the aircraft’s nose to turn further to the left
- As reverse thrust is a force acting backwards and the aircraft is pointing to the left (into the wind), this adds to the force of crosswind, further pushing the aircraft towards the right (downwind side)
- To regain directional control, we need to reduce the force that pushes us downwind. Since we cannot change the wind, we can reduce reverse thrust to idle (not cancel it!), release the brakes and get back to the centerline using the rudder pedals and differential braking as needed
- Once directional control is regained, we can reapply reverse thrust and brakes as needed
[Updated] Up until what point can you execute a go-around?
- Up until selecting reverse thrust
- Once reverse thrust has been selected, you are committed to land
Background info:
- A go-around executed below minimums is called a rejected landing if initiated prior to touchdown or a balked landing if initiated after touchdown
- Jet engines are designed to spool up from idle to maximum thrust within 8 seconds
How do you convert wind speed in m/s into kts?
- As a rule of thumb, knots are approximately double the m/s (e.g. 5 m/s is 10 kts)
[New] You are flying a LOC/DME approach with approach path angle 3.9° and groundspeed 150 kt. What is the required rate of descent?
- To calculate rate of descent required use formula: approach gradient x groundspeed
- In this case since we are given the approach path angle, we need first to calculate the gradient which is equal to approach path angle / 60
- Approach gradient = 3.9 / 60 = 6.5%
- Therefore ROD required is: 6.5 x 150 = 975 ft / min
[New] You are flying a VOR approach with approach path angle 3° and groundspeed 130 kt. What is the required rate of descent?
- To calculate rate of descent required use formula: approach gradient x groundspeed
- In this case since we are given the approach path angle, we need first to calculate the gradient which is equal to approach path angle / 60
- Approach gradient = 3 / 60 = 5%
- Therefore ROD required is: 5 x 130 = 650 ft / min
Note:
- For 3° approach path angle, rate of descent is 5 x ground speed (or half the groundspeed x 10)
[New] You are flying a LOC/DME approach with gradient 5.5% and groundspeed 140 kt. What is the required rate of descent?
- Note that in this case you are given the approach gradient and not the approach path angle
- Rate of descent required is: 5.5 x 140 = 770 ft / min
What is the crosswind component if you are taking off on runway 03 with wind 010/20 kts?
- As a rule of thumb, you take the difference of the wind direction with the runway, add 0.2 and multiply it by the wind speed
- For this example the crosswind component would be 0.3-0.1=0.2+0.2=0.4×20=8 kts
What is the crosswind component if you are taking off on runway 03 with wind 060/20 kts?
- By using the abovementioned rule of thumb, the crosswind component for this example would be 0.6-0.3=0.3+0.2=0.5×20=10 kts